核心要点
- 自动驾驶汽车利用机器视觉技术来感知和理解周围环境,这使得它们能够检测物体、识别交通标志并在道路上安全行驶。
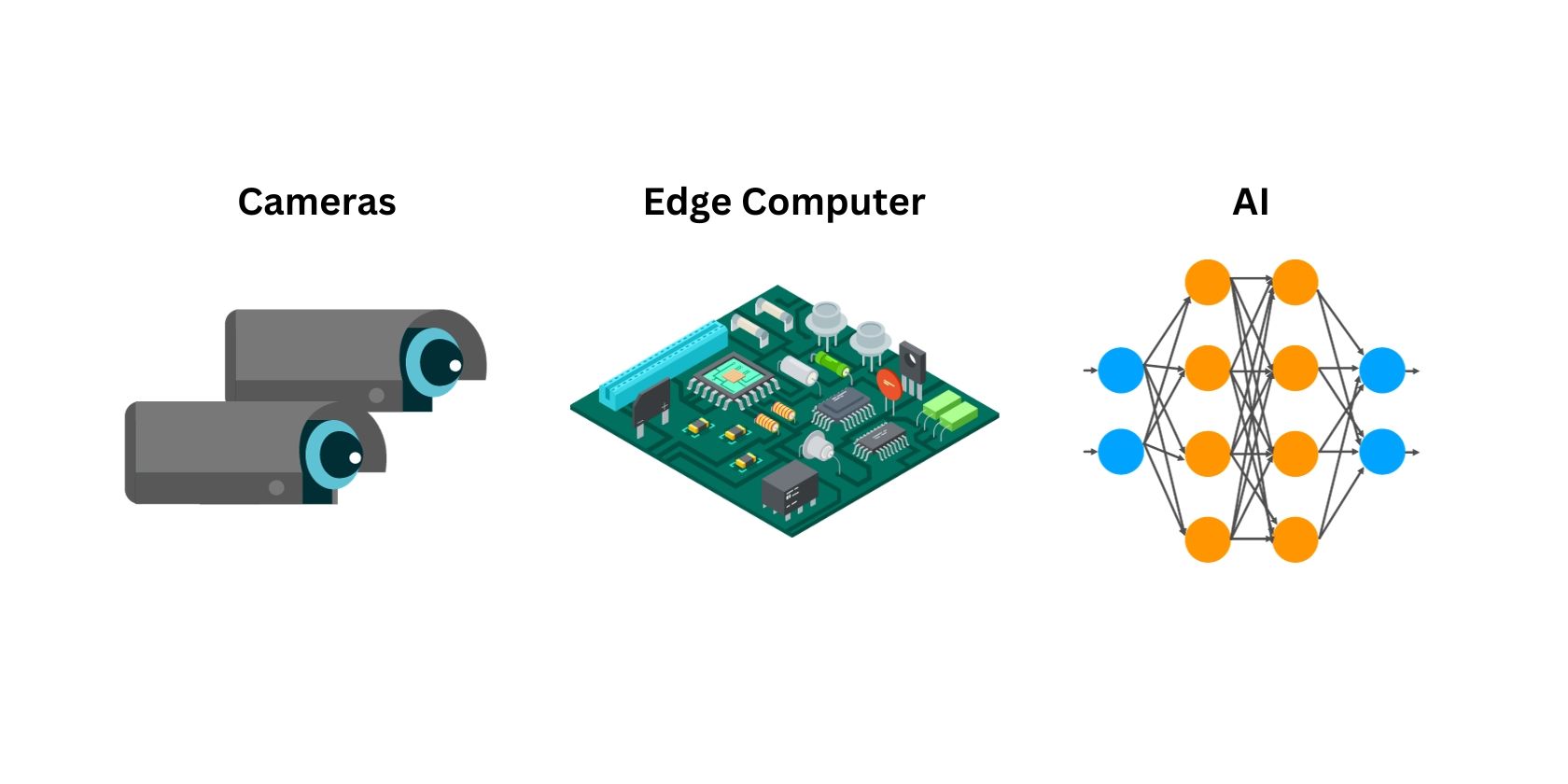
- 自动驾驶汽车的机器视觉系统由摄像头阵列、边缘计算单元和人工智能算法构成,它们协同工作以采集视觉信息、实时处理数据并识别模式和物体。
- 机器视觉对于实现自动驾驶汽车的完全自主至关重要,因为它实现了诸如物体分类、车道线和交通信号检测、标志识别以及交通状况感知等功能。自动驾驶汽车的未来发展高度依赖于人工智能、边缘计算以及摄像头技术的不断进步。
自动驾驶汽车一直是科技领域的热门话题。尽管完全无人驾驶的汽车可能尚未普及,但我们现在已经拥有配备先进驾驶辅助系统 (ADAS) 的车辆,这些系统可以执行自动转向、变道、泊车以及自适应巡航控制等功能。
自动驾驶汽车的 ADAS 依赖于大量的传感器,其中机器视觉是识别、检测物体并计算其与周围环境之间距离的主要方式。如果没有机器视觉,配备巡航控制和自动驾驶功能的自动驾驶汽车将难以实现。
什么是机器视觉?

机器视觉是一种赋予机器“视觉”能力并使其能够识别周围环境物体的技术。它是计算机视觉的一个分支,专注于机器人和车辆等自主机器中面向视觉的物体检测的工业应用。
如今,机器视觉通常采用诸如卷积神经网络 (CNN) 等人工智能深度学习算法,来构建强大且泛化的模型,从而能够准确识别各种条件下的物体。这使得机器视觉技术得以应用于制造业、农业、机器人和汽车领域中需要高可靠性的各种任务。
机器视觉在自动驾驶汽车中如何运作?
自动驾驶汽车中的机器视觉系统通常分为三个主要部分:摄像头系统、处理单元(边缘计算)和人工智能算法。这种技术组合使得自动驾驶汽车能够在行驶过程中“看”、“思考”并识别交通标志和障碍物。 让我们深入研究每个部分,了解这些技术如何协同工作以实现自动驾驶汽车的机器视觉。
摄像头系统
机器视觉依赖摄像头系统来收集周围环境的视觉信息。 自动驾驶汽车通常在其周围安装多个摄像头,以尽可能多地采集视觉信息。
在机器视觉相机中,主要使用两种类型的传感器:互补金属氧化物半导体 (CMOS) 和电荷耦合器件 (CCD)。对于自动驾驶汽车,CMOS 通常因其读取速度快、强大的车载电子设备以及并行处理能力而更受欢迎。 这使得它成为更快速的传感器,尽管它也更容易产生噪声或伪影。诸如不同的照明模式、数字夜视仪以及滤镜等解决方案有助于 CMOS 传感器在光线不佳的条件下更好地工作。
对于自动驾驶汽车,摄像头通常以一定的距离彼此安装,以实现立体视觉。 立体视觉是指结合两个或多个视觉输入,从而创造出深度感或三维感的能力。这使得汽车能够通过三角测量来计算出物体与汽车之间的大概距离。
人类由于拥有两只眼睛,也受益于立体视觉。你可以自己做一个简单的测试:闭上一只眼睛,然后在桌子上选择一个小的物体。将你的手放在物体的一侧,确保物体的尖端离你的手至少有两英寸的距离。暂停几秒钟,看看你对这个距离的估算有多大的把握。现在,睁开你的双眼,看看你的深度感知能力是否更好。
边缘计算机
当自动驾驶汽车上的摄像头系统收集数据时,车载计算机(边缘处理器)会实时处理所有输入信息,从而立即更新系统对周围环境的感知。尽管传统的机器视觉任务可以通过使用云计算来降低成本,但对于自动驾驶汽车而言,连接到云端的风险太大,即使只是为了外包机器视觉的处理任务。
使用边缘计算机来处理输入数据能够消除延迟问题,并确保实时接收、处理和传输数据。 自动驾驶汽车的边缘计算机通常使用集成了人工智能图形处理器(例如 NVIDIA 的 Tensor Core 和 CUDA Core)的专用计算机。
人工智能算法
算法一直是机器视觉的关键组成部分。算法使得计算机能够识别摄像头系统提供的所有模式、形状和颜色。与传统的机器视觉算法相比,使用人工智能可以显著增强自动驾驶汽车可靠识别物体、道路标志、道路标记和交通信号灯的能力。许多人工智能算法被用来训练自动驾驶汽车。其中最受欢迎的包括:
- YOLO(You Only Look Once):一种实时的物体检测算法,能够识别并跟踪汽车视野中的物体。
- SIFT(尺度不变特征变换):用于特征提取,帮助汽车识别周围的独特地标和物体。
- 定向梯度直方图(HOG):用于对象识别,侧重于从图像中提取局部模式和梯度信息。
- TextonBoost:一种通过分析环境纹理来帮助识别物体的算法。
- AdaBoost:AdaBoost 用于数据分类,它结合了多个弱分类器,从而对车辆路径中的物体和障碍物做出更准确的判断。
机器视觉在自动驾驶汽车中的重要性
 图片来源:意大利汽车/弗利克
图片来源:意大利汽车/弗利克
机器视觉是自动驾驶汽车感知和理解周围环境的主要途径。如果没有机器视觉,自动驾驶汽车的自动化程度很可能将倒退至 1 级,并且可能永远无法实现完全自主驾驶。
借助机器视觉,自动驾驶汽车现在能够进行物体分类、车道和交通信号检测、标志识别以及交通状况感知。
虽然目前许多自动驾驶汽车都采用了各种传感器,例如激光雷达、雷达和声纳,但它们仍然严重依赖机器视觉来观察环境、识别物体并理解道路上的标志和交通灯的含义。 这些额外的传感器只是为了增强机器视觉系统的性能,并进一步保障行人、动物和财产的安全。
也就是说,机器视觉可以独立运行,无需其他传感器的辅助就可以实现自动驾驶功能。事实上,特斯拉最新的自动驾驶汽车已经放弃了雷达,现在其自动驾驶系统仅依赖于机器视觉。
尽管这并不意味着要质疑其他传感器技术的实用性,但这确实突显了机器视觉在自动驾驶汽车中的重要性和强大能力。
自动驾驶汽车机器视觉的未来
机器视觉是自动驾驶汽车的基础。通过机器视觉,汽车可以像人类一样观察和感知周围环境。尽管仍然存在挑战,但机器视觉在安全性和导航方面的优势不容忽视。展望自动驾驶汽车的未来,人工智能、边缘计算和/或摄像头技术的任何进一步发展都将使自动驾驶汽车更加智能,并有可能使其自动化程度达到更高水平。